
Esta semana cada alumno ha construido una mano robótica. Para ello hemos utilizado el siguiente material: pajitas, cinta adhesiva, tijeras, hilo y rotuladores. Cada pajita emulará el comportamiento de un dedo al cual daremos movimiento con un hilo, que simulará el funcionamiento de nuestros tendones.

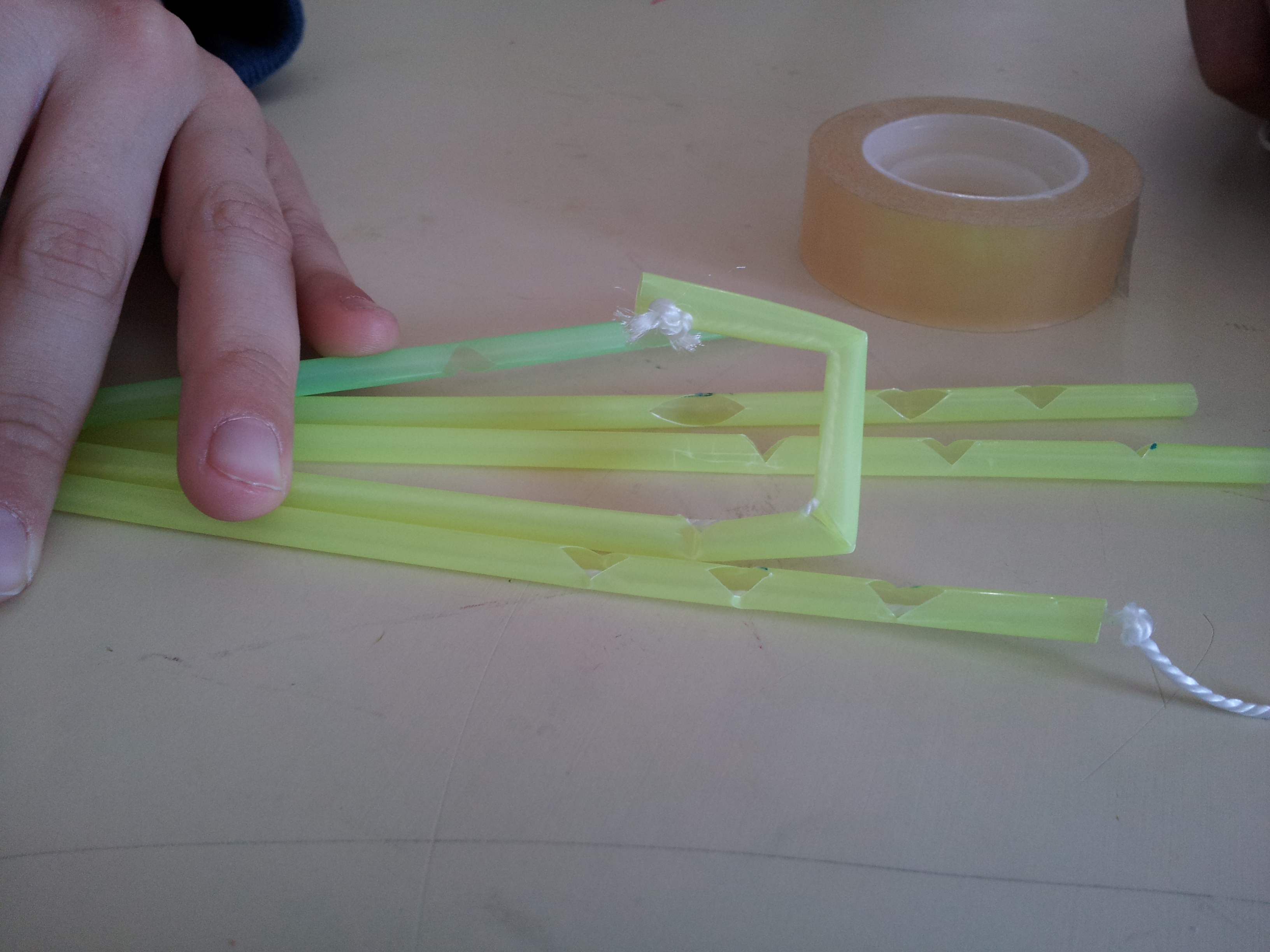
El primer paso es unir cuatro de las pajitas con cinta adhesiva por debajo de la zona estriada. Separamos las pajitas doblándolas por su codo para que cada una de ellas se corresponda a un dedo y, en conjunto, tengan la misma envergadura que nuestra mano.

Colocamos la zona estriada a la altura de la articulación de la muñeca mientras que cada una de las pajitas la situamos sobre nuestros dedos y las cortamos al tamaño de cada uno de ellos. Señalamos las tres articulaciones con un rotulador.

Para realizar la función de la articulación, doblamos la pajita por las marcas realizadas y cortamos con tijeras con mucho cuidado para que todas se doblen en la misma dirección.
Añadimos una quinta pajita que simulará nuestro dedo pulgar, la fijamos con cinta adhesiva, cortamos al tamaño deseado y señalamos, en este caso, sólo dos articulaciones y las cortamos.

Finalmente, cortamos un cordón, le hacemos un nudo en uno de los extremos y lo introducimos por la pajita hasta enganchar el nudo en una ranura o corte, anteriormente realizada para tal efecto en el extremo superior de la pajita. Efectuamos esta operación para cada uno de los dedos.
Así se mueven nuestros dedos robóticos.
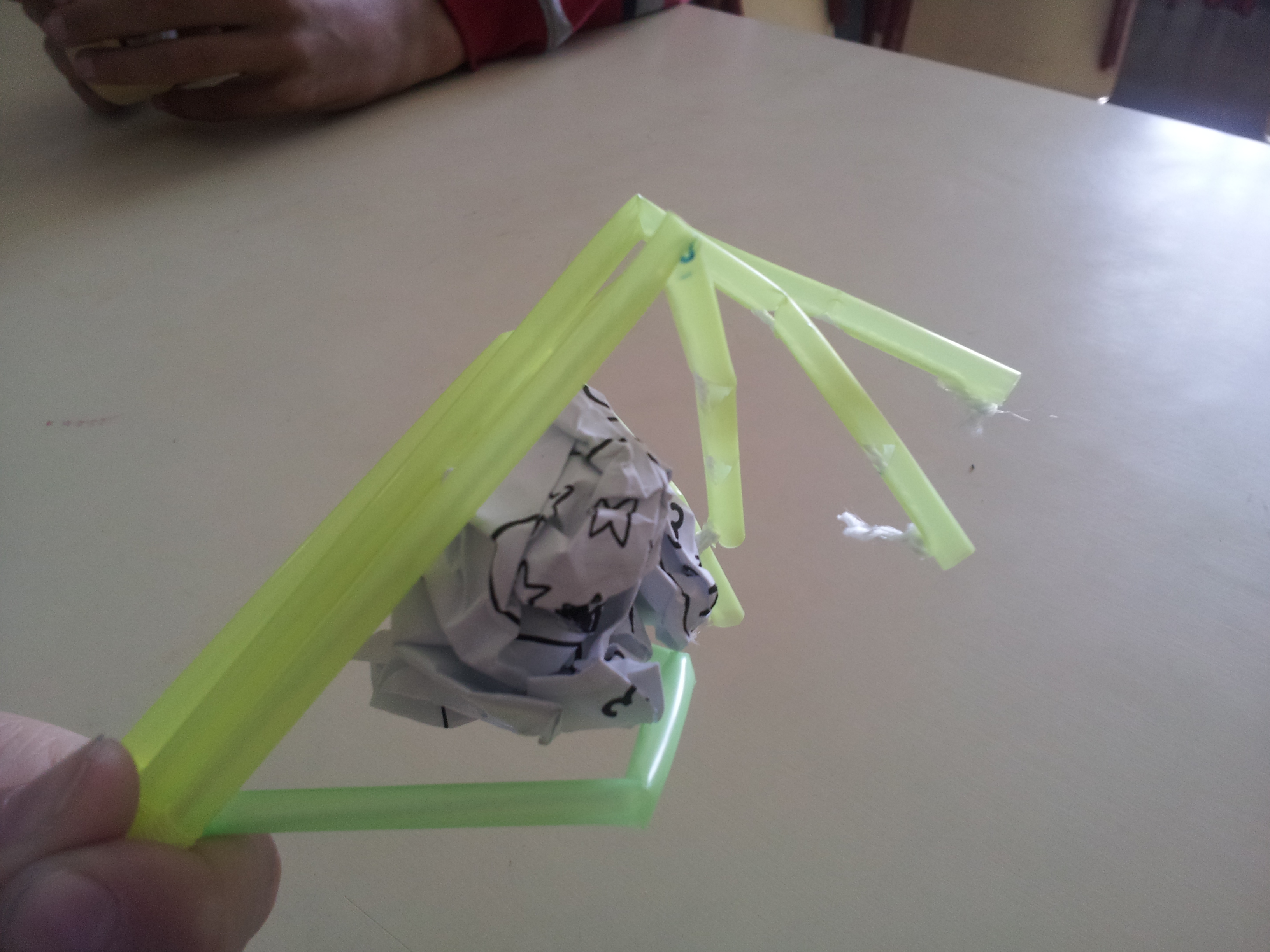
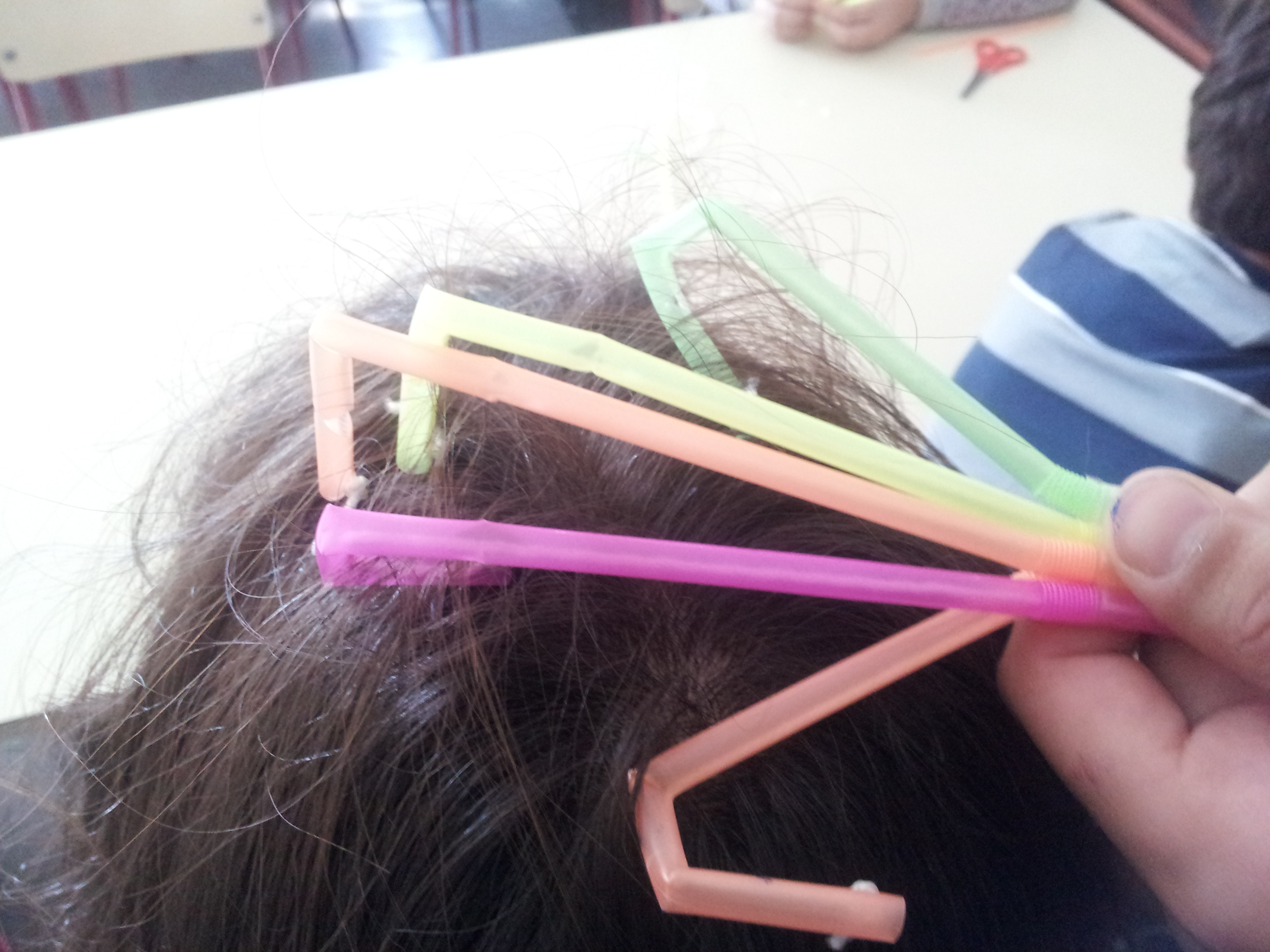
Aquí mostramos dos posibles usos de nuestra mano robótica:
- Para coger objetos ligeros.
- Para rascar nuestras cabezotas.
Podemos dotar de mayor realismo a nuestra mano robótica si le pegamos pequeños trocitos de goma-eva a modo de piel.

¿Se te ocurre alguna otra aplicación en la que pudiésemos usar nuestra mano robótica?
