
Hace unos días, en las clases de robótica del colegio Tomás Bretón, se nos han colado un grupo de gigantes y torpes marionetas. Incapaces de moverse de manera autónoma, y gracias a nuestros conocimientos de robótica y programación, hemos ideado un sistema para ayudarlas en su movimiento.
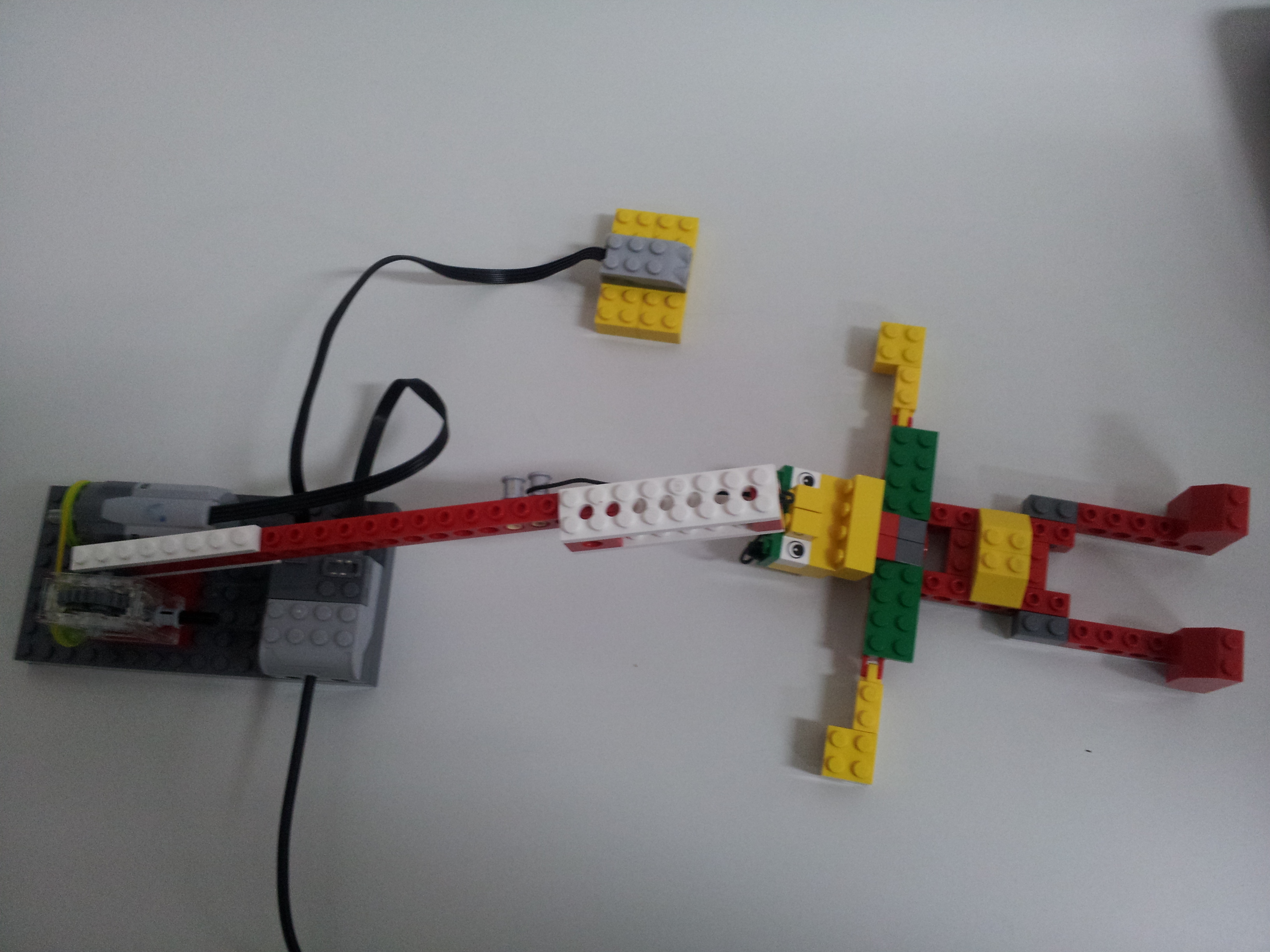
Aquí mostramos una de las desmañadas marionetas.
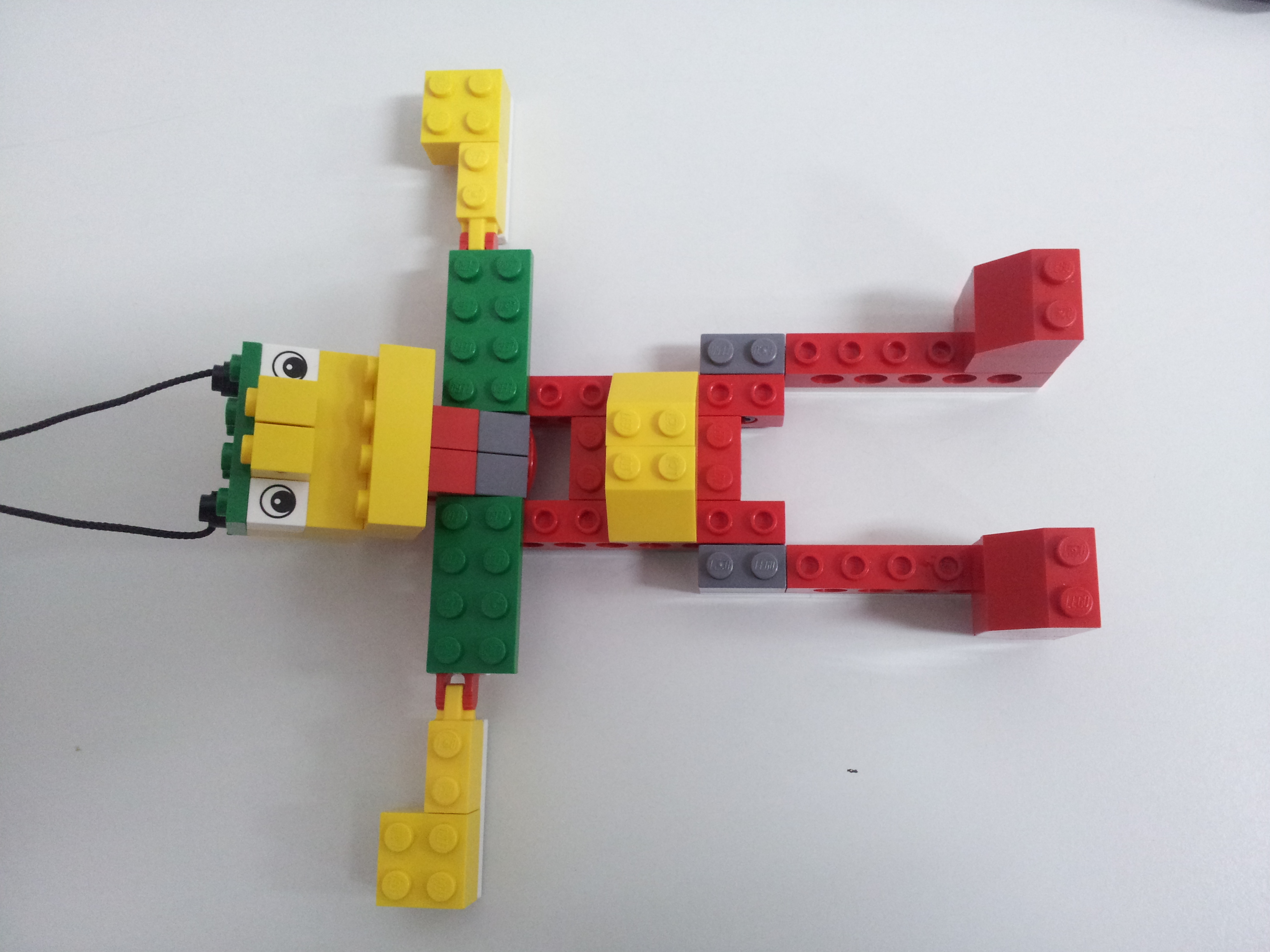
Si observamos con atención nos damos cuenta de que, estas criaturas, disponen de articulaciones en la zona del cuello, codos y caderas.
Tal y como están configuradas, si las ponemos en pie, se les doblará tanto el cuello con respeto al cuerpo, como el cuerpo con respecto a las piernas.
Ahora vamos a pasar a montar una grúa que sea capaz de levantar a nuestras adorables marionetas.
Empecemos por idear el mecanismo.
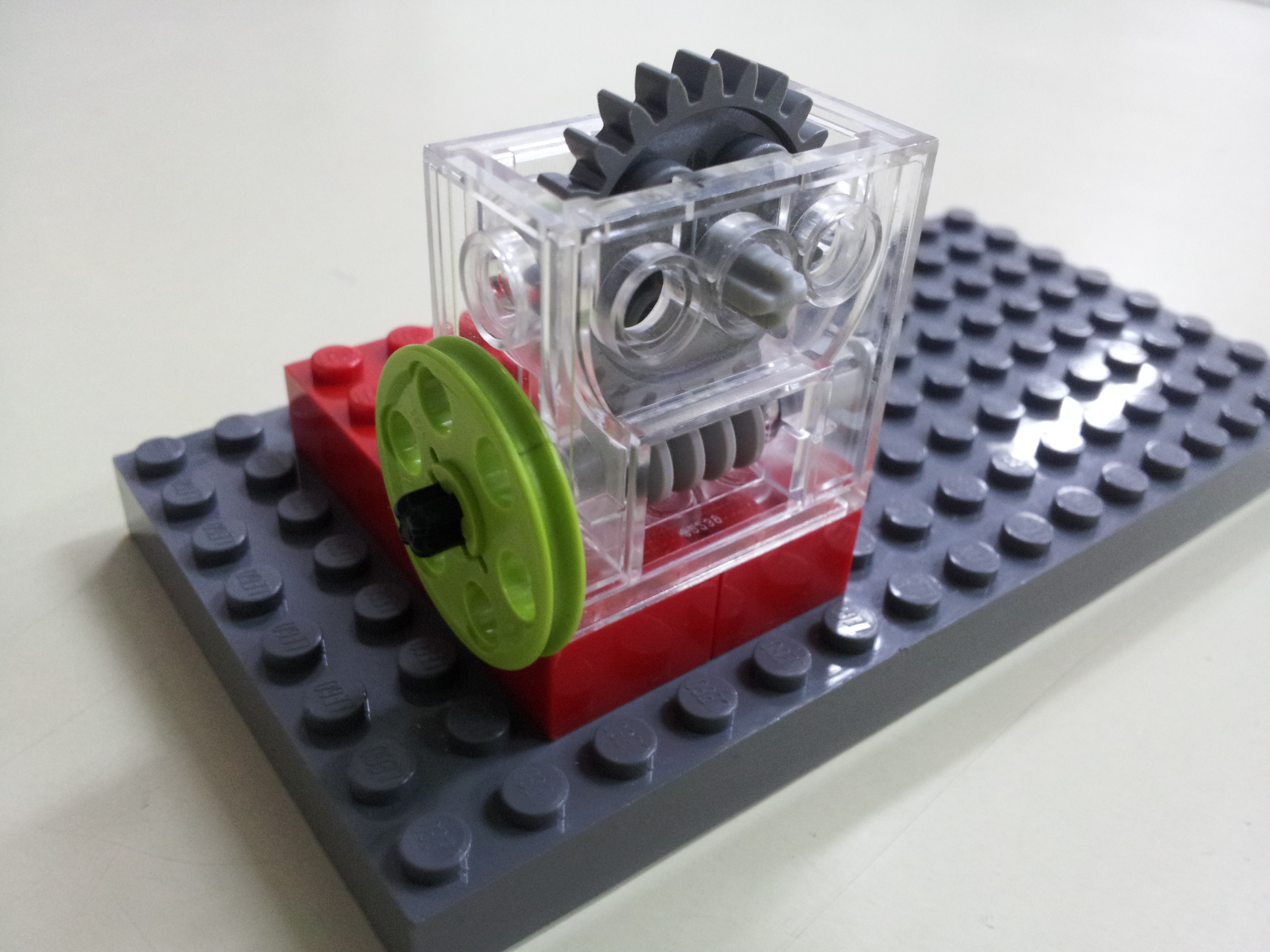
Hemos usado un tornillo sin fin, que transmite su movimiento a un engranaje de dientes planos. Un tornillo sin fin equivale a un engranaje de un diente. Esto implica dos cosas:
- Una reducción de la velocidad: para que el engranaje de dientes planos dé una vuelta completa serán necesarias tantas vueltas del tornillo sin fin como dientes tenga el engranaje. Cada vez que el tornillo sin fin da una vuelta completa el engranaje avanza tan sólo un diente en su giro.
- Un aumento de la potencia: la fuerza que ejerce el sistema formado por el tornillo sin fin- engranaje multiplica su potencia en la misma proporción que disminuye su velocidad.
Esta última propiedad nos va a ser muy útil para poder mover con facilidad a la pesada marioneta gigante.
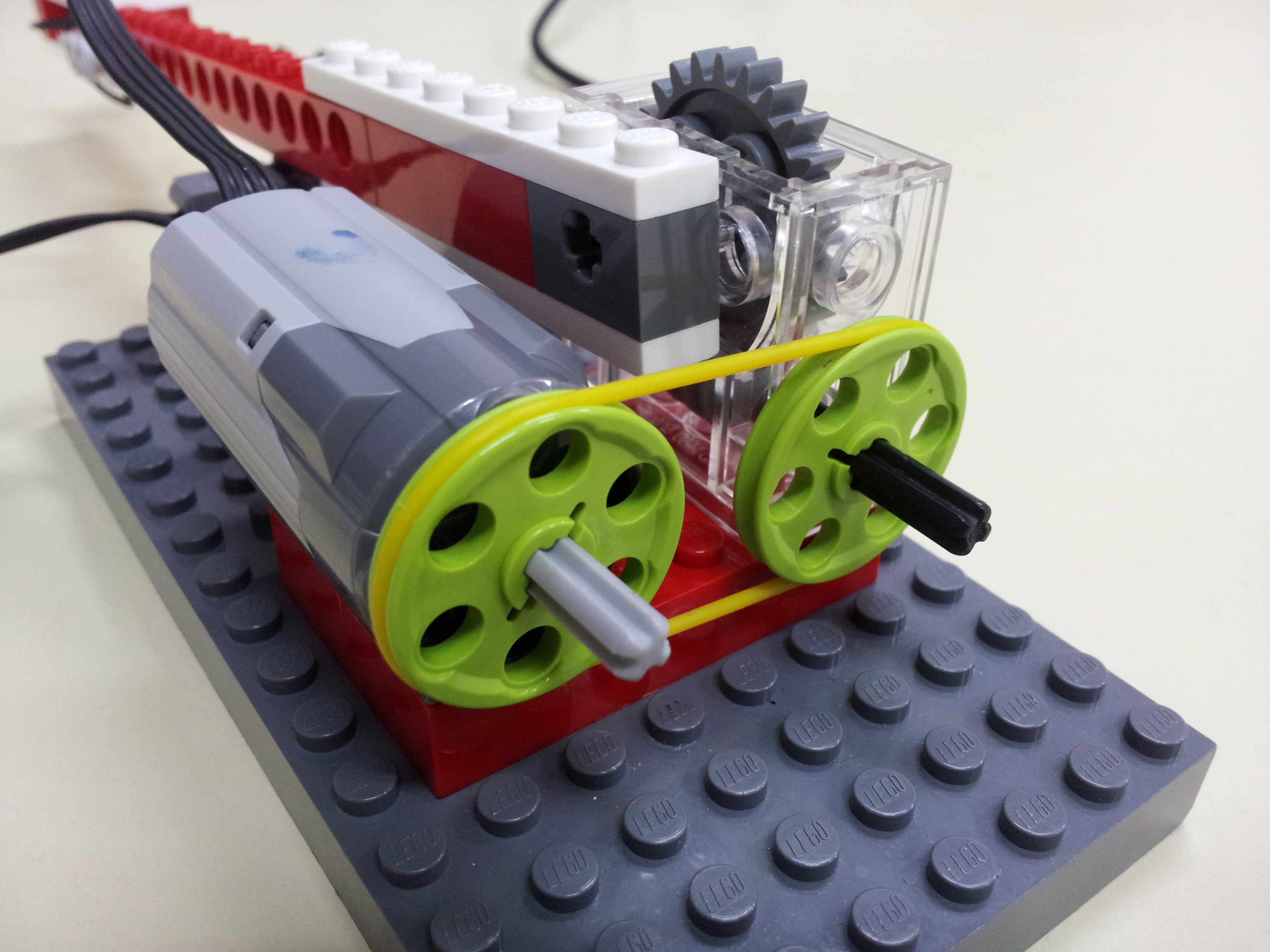
Ahora debemos idear la manera de transmitir el movimiento de giro del motor al tornillo sin fin. Para ello nos valemos de un sistema de dos poleas unidas mediante una goma a modo de correa de distribución. Una de ellas se mueve solidaria al eje insertado en el motor y la otra al eje insertado en el tornillo sin fin.
Construimos ahora el mástil de la grúa.
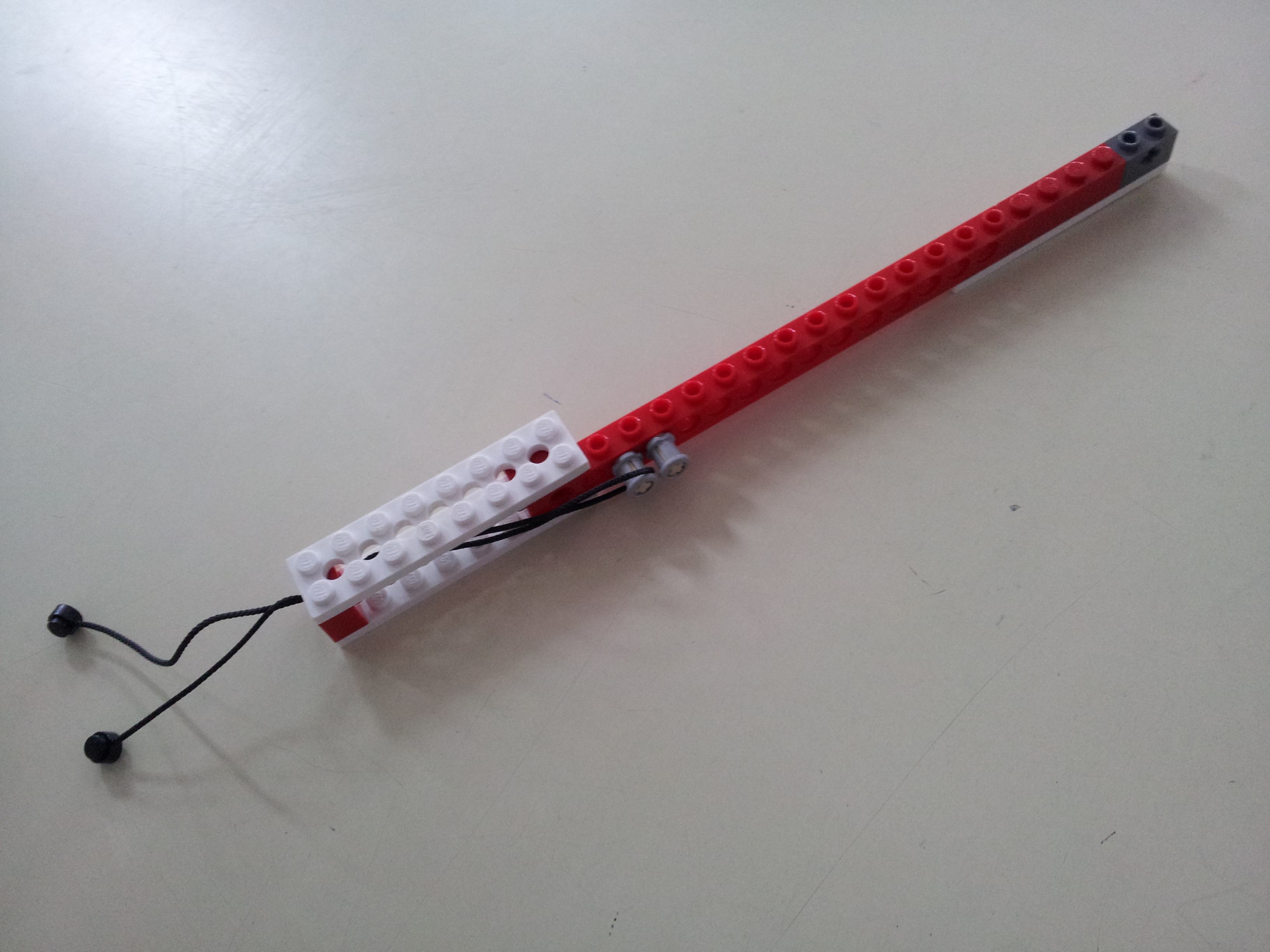
La pieza gris con el agujero con forma de cruz es la que se fijará en el eje del engranaje.
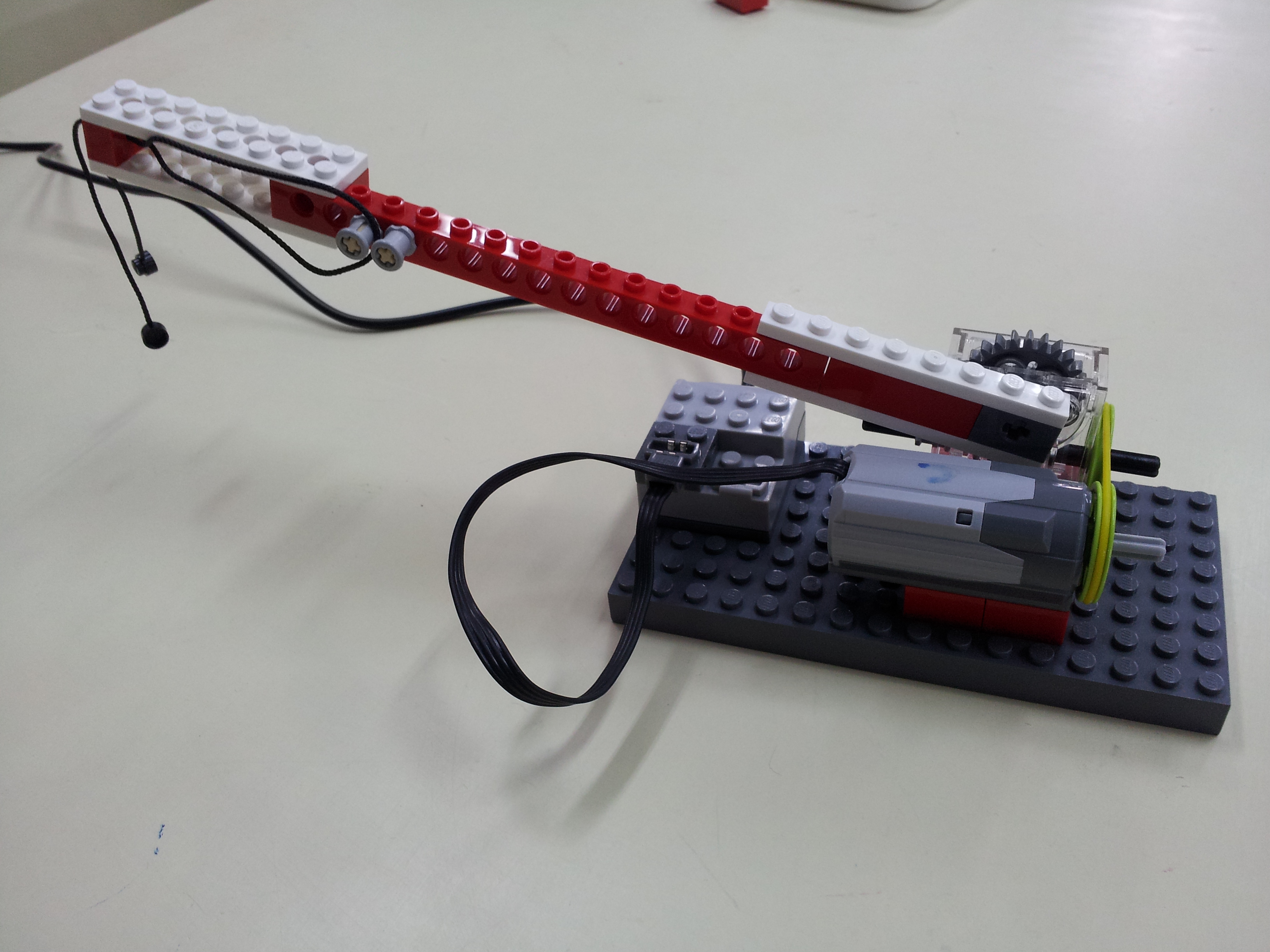
En la imagen se muestra cómo queda la grúa totalmente terminada. Ahora es el momento de ayudar a nuestros pequeños gigantes enganchándoles mediante una cuerdecilla.
Para finalizar, programaremos nuestro sistema añadiéndole el sensor de distancia, de manera que cuando se detecte algo cerca del sensor se activará el motor, elevando el mástil paso a paso. Esto se consigue encendiendo el motor durante un breve intervalo de tiempo y esperando un segundo entre cada uno de los avances para tener un mayor control y evitar catástrofes. Por el contrario, cuando no detecte nada cerca bajará a la marioneta (encender el motor en el sentido contrario durante un periodo pequeño de tiempo y también esperando un segundo entre paso y paso) . Es deseable programar una tecla para parar el motor en cualquiera de los dos casos subida y bajada.
Para finalizar qué mejor que ver nuestro mecanismo en funcionamiento:
