
Aunque ya tenemos experiencia en robots, no está de más hacer una pequeña reflexión sobre: qué son los robots y qué tipo de robots hay.
Los primeros robots fueron los denominados autómatas (término que significa espontáneo o con movimiento propio), solían ser máquinas compuestas por una gran cantidad de piezas que, en conjunto, componían un mecanismo el cual realizaba movimientos.

Un ejemplo de autómata que encontramos en España es el Papamoscas, situado en lo alto de la nave mayor de la catedral de Burgos. Todas las horas en punto abre la boca a la vez que mueve su brazo derecho para accionar el badajo de una campana.
En la actualidad, el concepto de robot se ha extendido y ampliado. Según la R.A.E. un robot es «una máquina o ingenio electrónico programable, capaz de manipular objetos y realizar operaciones antes reservadas solo a las personas.»
Vamos a hacer pues una clasificación muy básica y tosca de los robots:
- Robots simples o «tontos»: son autómatas en sí mismos.
- Robots complejos o «listos»: programables y con capacidad de adaptación.
Y pondremos como ejemplos robots vistos en clase.
ROBOT SIMPLE
Para ejemplarizar este tipo de robots recordemos los BEAM´s que creamos hace unas semanas en el colegio Tomás Bretón.
Estos pequeños imitaban el movimiento de los insectos.
El mecanismo: consistía en un motor vibrador alimentado con una pila y que, unido a una pequeña estructura (cabeza de un cepillo de dientes), creaba un movimiento aleatorio.
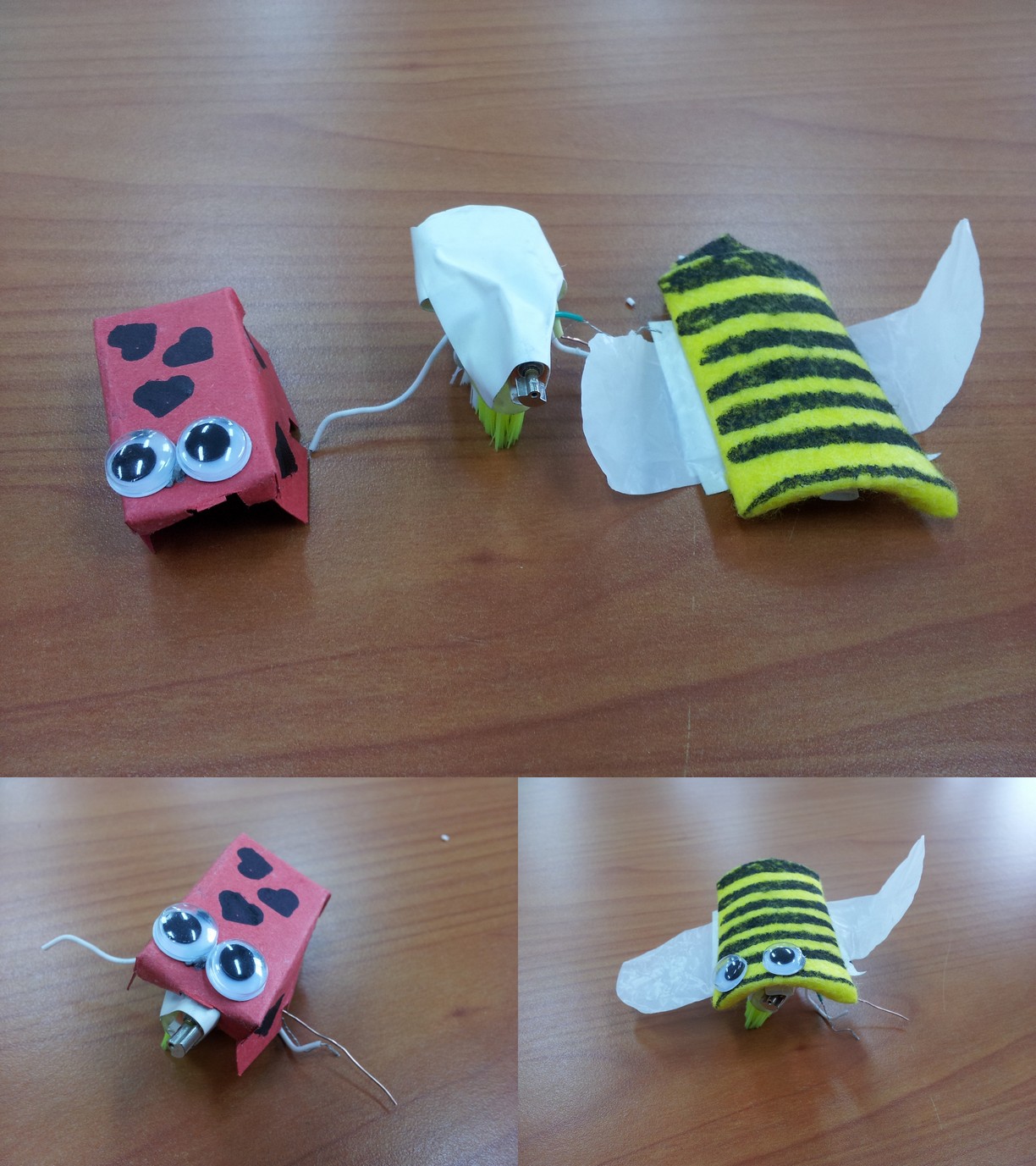
La carcasa: en la figura se muestran los disfraces de un BEAM mariquita y un BEAM abeja.
Por otra parte, también podríamos considerar un robot simple al que nos mostró un alumno de primero de primaria en el colegio San Gabriel. Veamos los elementos que lo componían:
La carcasa: constituida por un conjunto de piezas duras y resistentes que albergan y protegen el mecanismo a la vez que le dota de un aspecto «humanoide». En este caso una caja de cartón reutilizada.
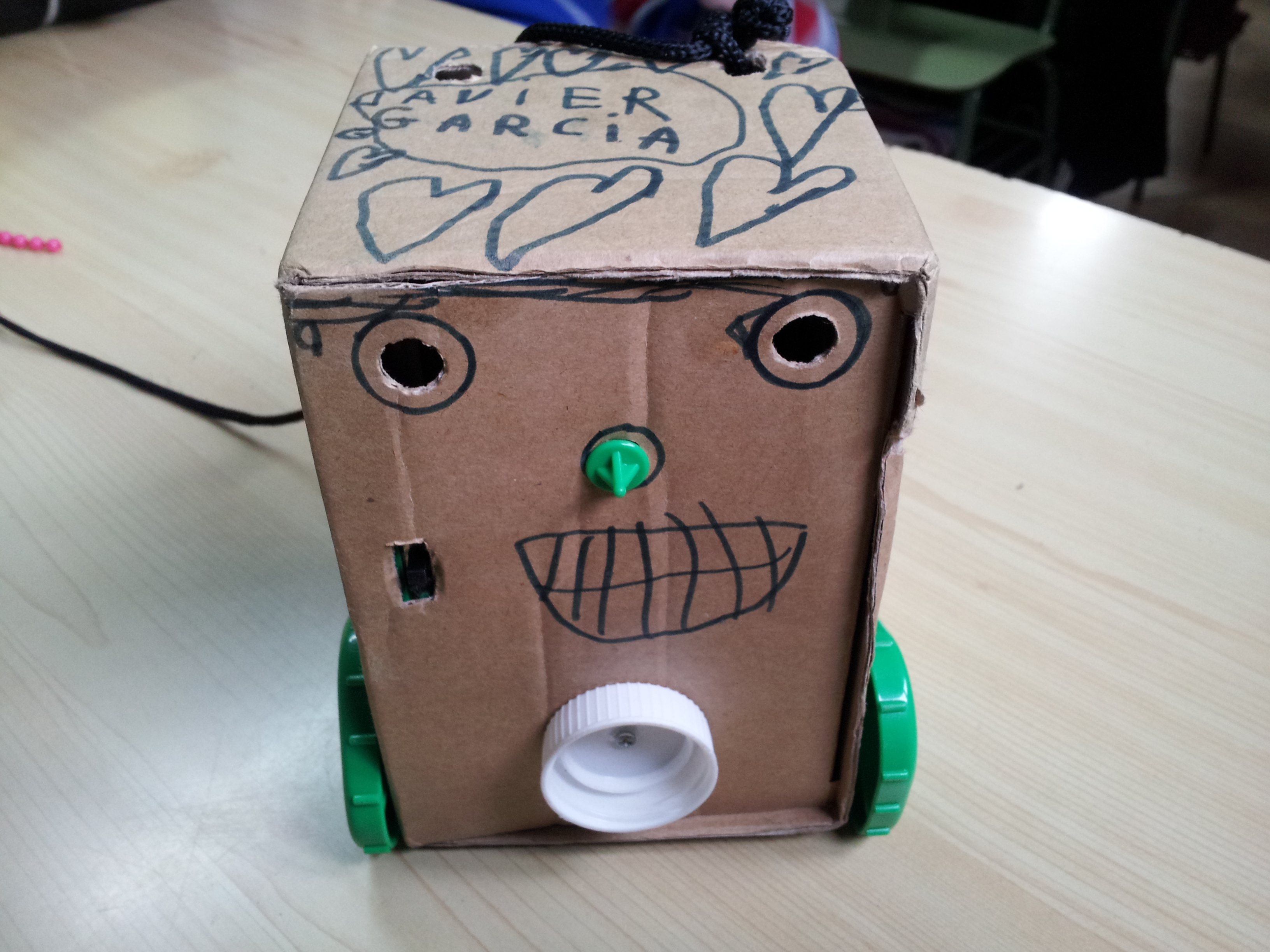
El mecanismo: motor alimentado por pilas que unido a un eje, en el que se insertan las ruedas, otorga de movimiento a nuestro autómata. Cuerda que ayudará a elegir la dirección del monigote de manera manual.

Ambos ejemplos expuestos pueden considerarse autómatas: tienen un mecanismo que les otorga movimiento. En el primero el movimiento es aleatorio y en el segundo guiado manualmente. Sus movimientos no son programables. Dicho llanamente: estos autómatas no saben a dónde se dirigen y además si les dejásemos sueltos al libre albedrío acabarían chocándose con algún obstáculo… luego son tontos.
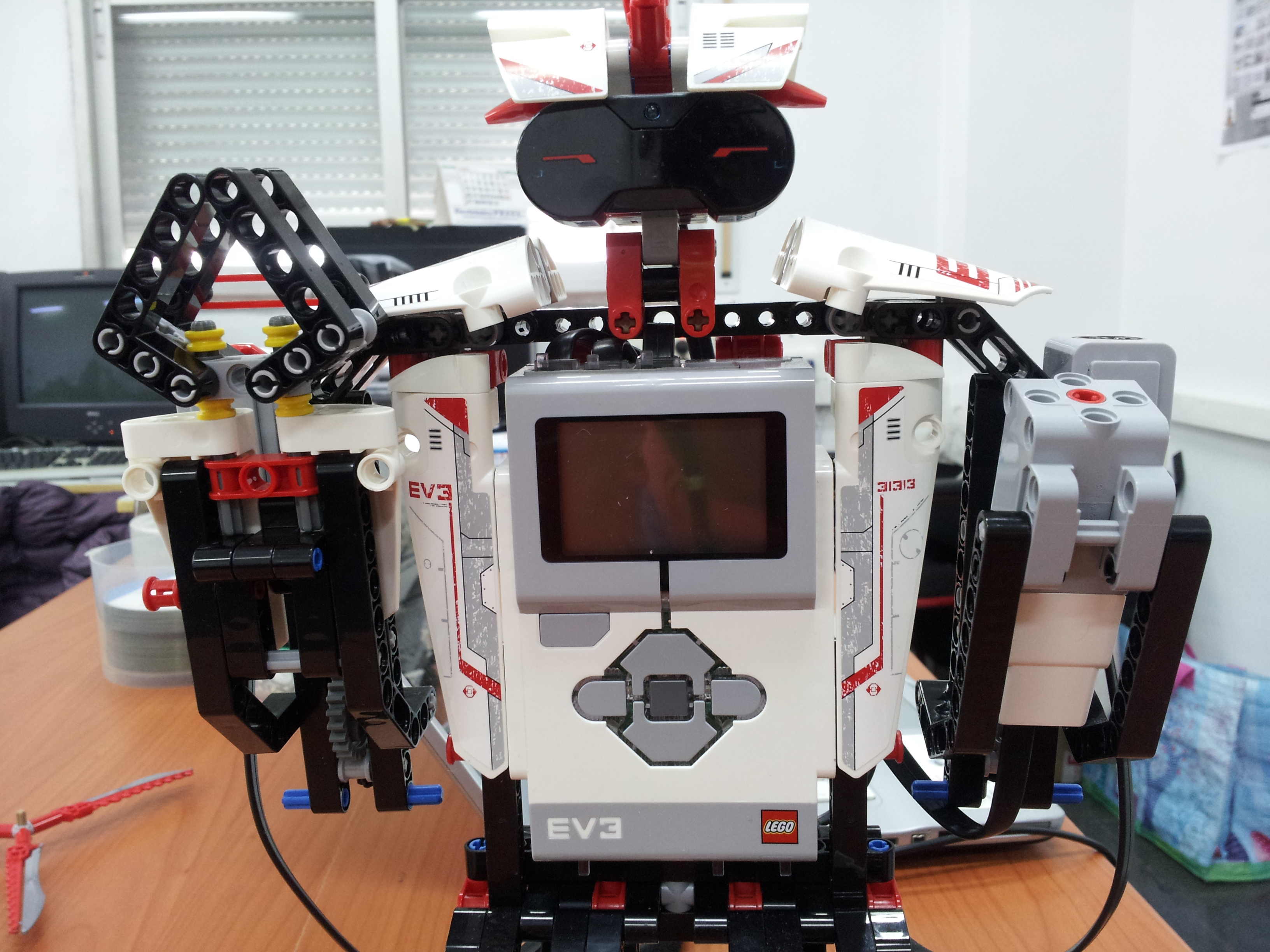
ROBOT COMPLEJO
Un alumno del Tomás Bretón nos dejó jugar con un robot más sofisticado.
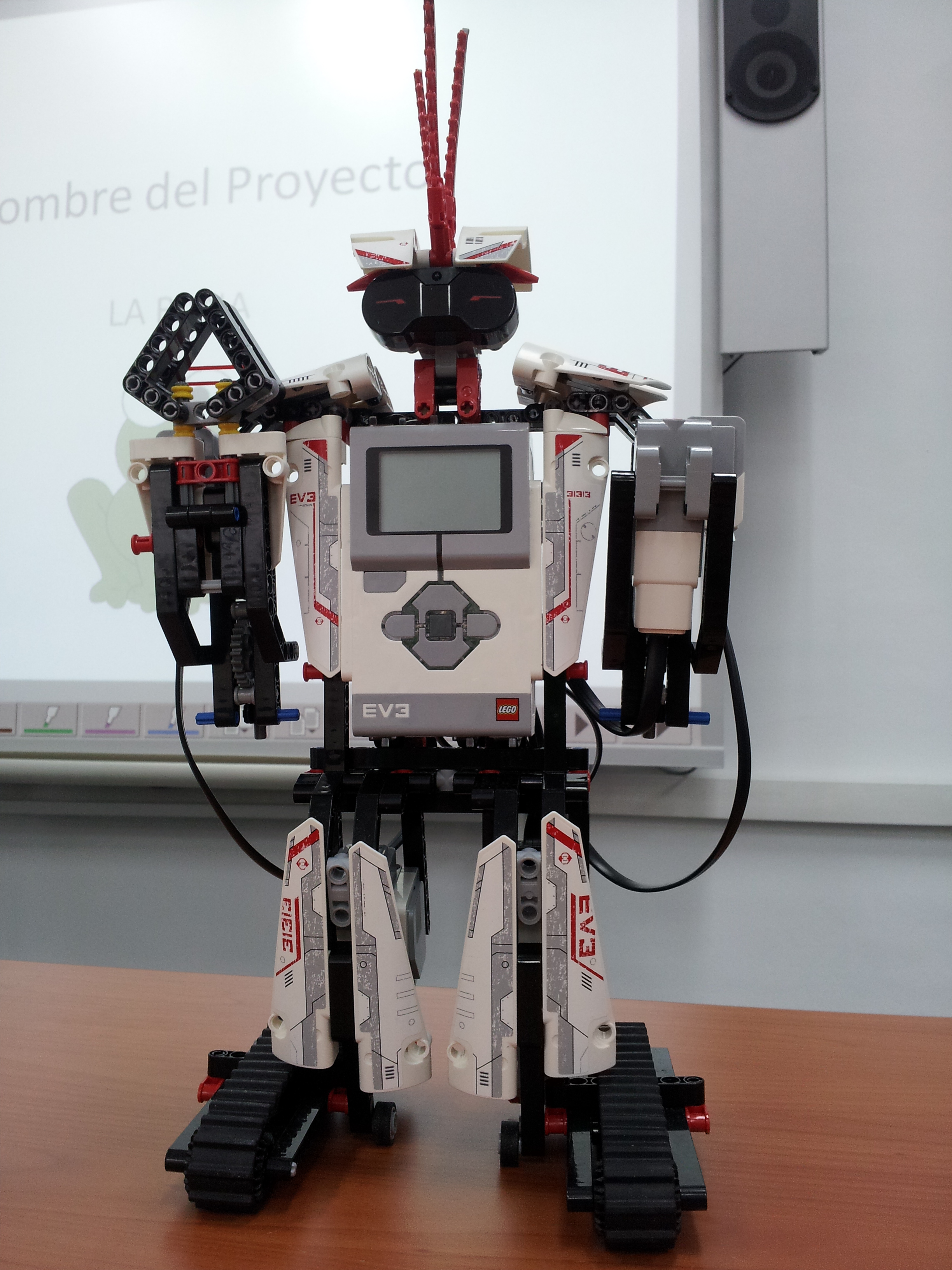
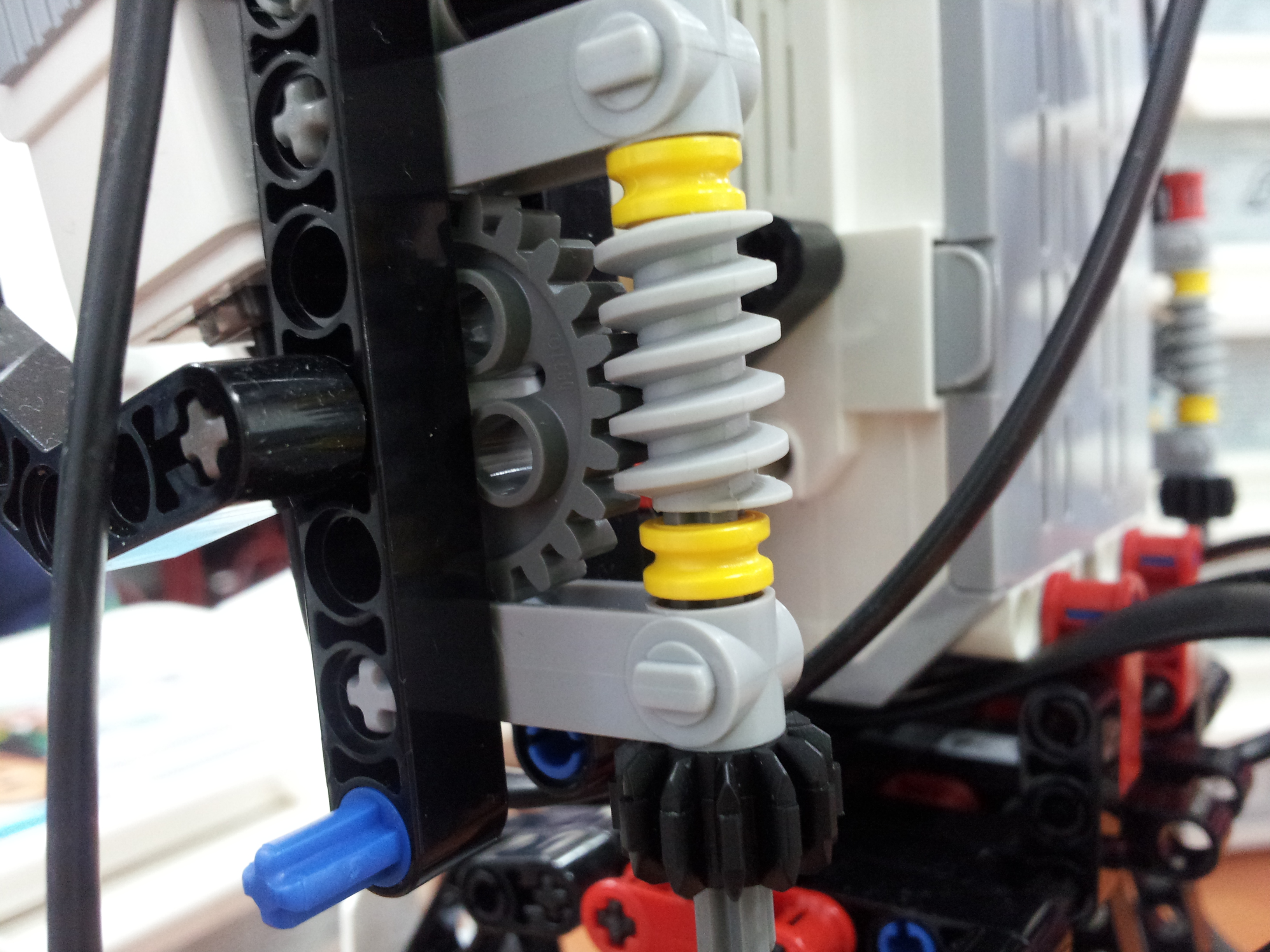
Los mecanismos: este robot dispone de elementos simples, tales como engranajes, ejes y tornillos sin fin, que realizarán transformaciones en la dirección, sentido y fuerza del movimiento.
Además también lleva integrados motores que le dotan de movimiento a sus extremidades y le permite actuar sobre el entorno.

Los sensores: elementos que le proporcionan información sobre el entorno, como por ejemplo el sensor de luz y el de distancia. Esto es un factor distintivo con respecto a los robots simples.

El microcontrolador: dispositivo programable que le otorga la «inteligencia» al robot. La clave es: en función de las circunstancias (cercanía o lejanía de un obstáculo, cantidad de luz en el ambiente…) programamos al robot para que actúe e interaccione con el entorno con unas acciones concretas. Por ejemplo: «Si el robot está en movimiento en una dirección y detecta un objeto cerca delante suyo decidimos que pare o que se dirija en dirección contraria.» A este comportamiento programado se le puede considerar «inteligente» pues el robot se adapta a un entorno variable.
A estos robots les vamos a considerar «listos» ya que a distintos estímulos dan distintas respuestas.
Pero ¿Realmente estos robots son inteligentes?
